
벡터 대수
Vector Algebra
스칼라(scalar): 크기로 규정되는 양으로 전자기학에서 스칼라량은 대표적으로 전하와 전압이 있다.
벡터(vector): 크기와 함께 방향 또한 함께 고려해야 하는 양으로 전자기학에서 벡터량은 대표적으로 전기장, 자기장이 있다.
- 벡터는 기하학적으로 방향을 나타내는 선분인 화살표[그림 1]로 나타난다.
그림 1. 벡터 A
- 벡터의 방향은 화살표의 머리이다. 한편 크기는 화살표의 길이와 같다.
- 벡터의 위치만 옮기는 평행이동의 경우, 벡터량은 달라지지 않는다.
[그림 2]에서 벡터 A의 성분(components) 및 벡터 A는 다음과 같이 표현 가능하다.
그림 2. 데카르트 좌표계에서의 벡터 A의 표현 [출처: University Physics with Modern Physics, Bauer & Westfall, 2nd ed., 2014, p.24]
벡터 덧셈
두 벡터의 덧셈 A+B는 기하학적으로 A의 머리에 B의 꼬리를 붙이는 방식[그림 2]으로 구할 수 있다.
그림 2. 삼각형법
혹은 [그림 3]과 같이 평행사변형법을 사용해도 된다.
그림 3. 평행사변형법
두 가지의 두 벡터의 덧셈법은 그 결과가 서로 일치한다.
- 벡터의 덧셈은 교환법칙(commutative)과 결합법칙(associative)이 성립한다.
스칼라 곱셈
- 어떤 벡터에 스칼라량 a를 곱하면 그 벡터의 크기는 a배가 된다.
- a>0인 실수이면, 그 벡터의 방향은 바뀌지 않는다. 하지만 반대의 경우(a<0)인 경우, 그 벡터의 방향은 바뀐다.
- 스칼라 곱셈(multiplication of a vector by a scalar, scalar multiplication)은 분배법칙(distributive)이 성립한다.
4. 어떤 벡터를 스칼라 나눗셈 함은 그 벡터에 스칼라량 a의 역수 1/a를 곱하는 것과 같다.
특히 4번의 성질을 이용하여, 벡터 A를 자신의 크기 A로 나누면 길이가 1이면서 방향은 A와 같은 벡터가 결과 값으로 나타나는 데, 이를 단위 벡터(unit vector)라 정의한다.
그림 4. 2차원, 3차원 상의 단위벡터 [출처: University Physics with Modern Physics, Bauer & Westfall, 2nd ed., 2014, p.27]
단위 벡터 | Unit Vector
■
- 단위벡터의 크기는 1이다.
- 단위벡터의 방향은 그 벡터 A의 방향과 같다.
스칼라곱과 벡터곱
Scalar Product and Vector Product
벡터를 곱하는 방법은 크게 두 가지 종류가 있다.
- 스칼라곱(scalar product): 점곱(dot product), 벡터 A에 대한 벡터 B의 사영[그림 4]을 곱한 값으로 결과는 스칼라량이다.
그림 4. 벡터 A에 대한 벡터 B의 사영(Acosθ)
점곱은 다음과 같이 정의 된다.
Scalar Product(Dot Product)
■
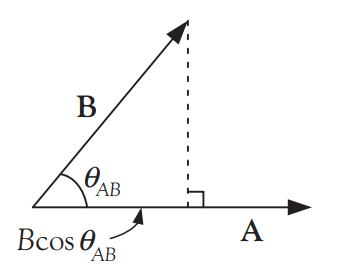
그림 5. Dot Product
기하학적으로 점곱 AB[그림 5]는 벡터 A의 크기에 벡터 B의 벡터 A 방향성분 Bcosθ을 곱한 것과 같다.
- θ이 0도에서 90도 사이인 경우 cosθ는 양수이고, 따라서 점곱은 양의 값을 갖는다.
- θ이 90도에서 180도 사이인 경우 cosθ는 음수이고, 따라서 점곱은 음의 값을 갖는다.
- θ이 90인 경우 cos90=0이므로, 점곱은 0이 된다. ⇒ 수직인 두 벡터의 dot product는 언제나 0이다.
점곱의 성질
- 점곱은 교환법칙이 성립한다.
- 점곱은 분배법칙이 성립한다.
단위벡터의 점곱
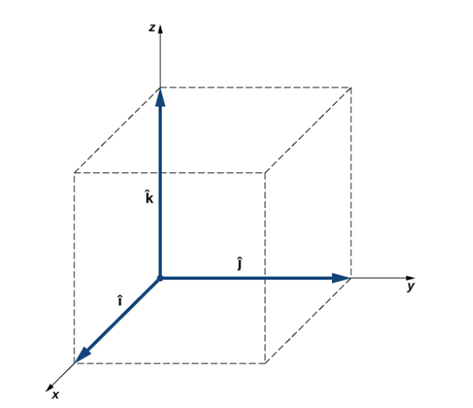
그림 6. 3차원 상의 단위벡터
3차원 상에서 단위벡터는 [그림 6]과 같이 나타나며 이들을 서로 스칼라곱한 결과는 다음과 같다.
- 단위벡터의 스칼라곱에서 윗 내용은 사잇각 θ이 0인 것으로 서로 평행하는 경우 scalar product의 결과는 다음과 같다.
단, 단위벡터의 크기는 1이므로 1을 제곱해도 역시 1이 나오기 때문에 위와 같은 결과가 성립된다.
- 단위벡터의 스칼라곱에서 아래 내용은 사잇각 θ이 90인 것과 정확히 일치한다.
2. 벡터곱(vector product): 가위곱(cross product), 벡터 A, B를 가위곱하면 그 결과 값은 벡터량[그림 7]이다.
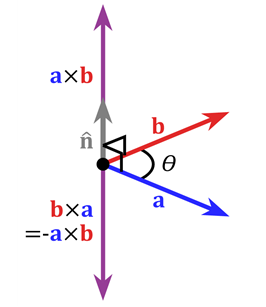
그림 7. 벡터곱 [출처: Wikimedia]
Vector Product(Cross Product)
■
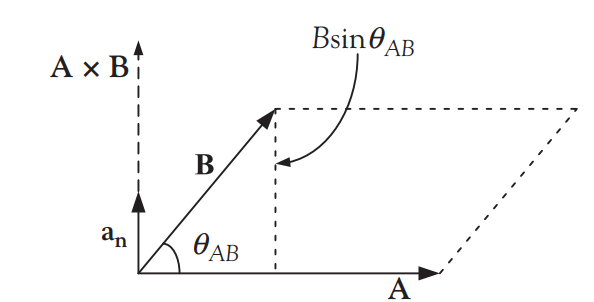
그림 8. 두 벡터의 가위곱
vector product 식의 물리량은 [그림 8]을 통해 확인할 수 있다.
- 벡터 A, B의 cross product 크기는 ABsinθ_AB이다. 즉, 벡터 A와 B가 만드는 평행사변형의 면적과 정확히 일치한다.
- 단위벡터 a_n은 가위곱의 방향으로 평행사변형이 놓인 평면에 수직한다. a_n의 방향은 [그림 9]와 같이 오른손 규칙으로도 확인할 수 있다.
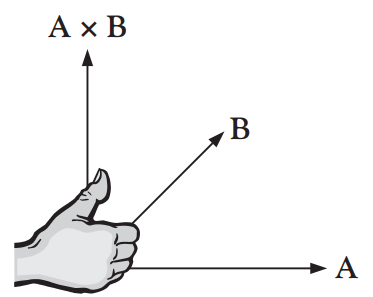
그림 9. 가위곱의 방향
가위곱의 성질
- 가위곱은 분배법칙이 성립한다.
- 가위곱은 교환법칙이 성립하지 않는다. 대신 역교환법칙을 따른다.
3. 가위곱을 하는 두 벡터 A, B의 사잇각이 90도일 때, sin90=1이므로 최대 크기 AB를 갖는다. 반면 두 벡터 A, B의 사잇각이 0도일 때, sin0=0이므로 벡터곱의 크기 또한 0이 된다.
단위벡터의 가위곱
단위벡터의 가위곱은 가위곱의 성질에 따라 다음과 같이 정리된다.
삼중곱 Triple Product
삼중곱은 두 벡터의 곱과 마찬가지로 그 결과에 따라 2가지 곱이 존재한다.
- 스칼라삼중곱
- 벡터삼중곱
스칼라삼중곱
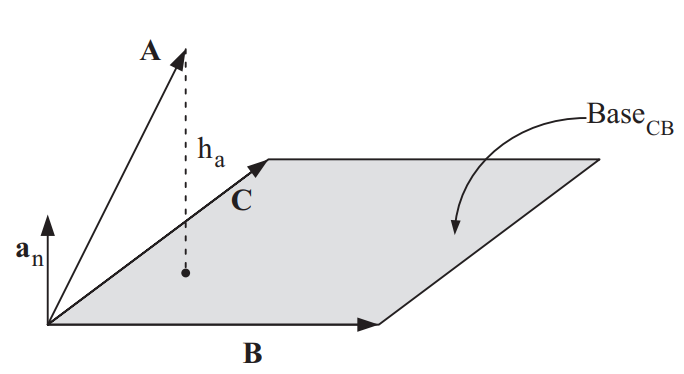
그림 10. 삼중곱
스칼라삼중곱[그림 10]의 결과는 스칼라량으로, 세 벡터가 만드는 평행육면체의 부피와 그 값이 같다.
- 단위벡터 a_n은 벡터 B와 C의 가위곱 방향과 같다. 또한, Base_CB는 벡터 B, C의 가위곱 면적이다.
- 만약 벡터 A와 단위벡터 a_n의 사잇각이 90도 미만이면 [그림 10]의 h_a 값은 양수이다. 반면 90도를 초과한다면 h_a 값은 음수이다.
- 벡터 A와 단위벡터 a_n의 스칼라곱의 결과는 평행육면체의 높이 값과 같다. 그리고 이 평행육면체의 부피가 스칼라삼중곱이다.
스칼라삼중곱
■
- 스칼라삼중곱의 점곱, 가위곱 순서를 바꾸어도 결과는 동일하다.
벡터삼중곱
벡터삼중곱은 간단하게 결과 값만 확인하자.
벡터삼중곱
■
단위벡터와 벡터 성분
Unit Vectors and Components
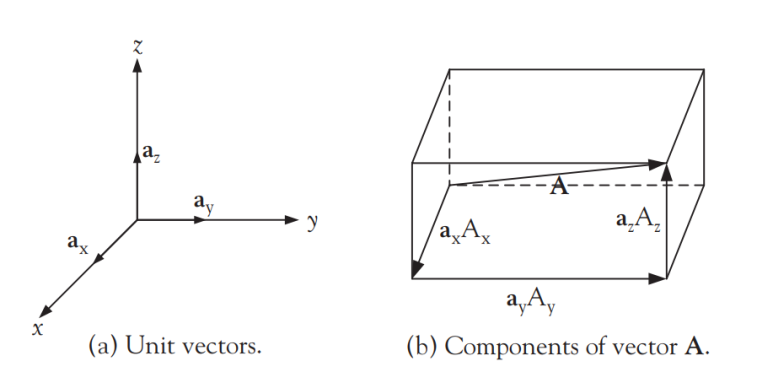
그림 1. 단위벡터와 성분
좌표계를 도입하면 벡터를 성분(components)으로 나타낼 수 있고, [그림 1]은 직각 좌표계(rectangular coordinate system, Cartesian coordinate system)를 사용하여 나타낸 벡터 그림이다.
- [그림 1]의 (a)는 unit vector들로 직각 좌표계의 x, y, z축과 그 방향성이 정확히 일치한다.
- [그림 1]의 (b)는 임의의 벡터 A로 x, y, z축에 각각 투영시킨 정사영벡터(projections)가 함께 그려져 있다. ⇒ 벡터 덧셈에 따라 벡터 A는 projection을 활용하여 아래와 같이 정의된다.
- 성분벡터 Vs. 성분
3차원 직각 좌표계에서 벡터 A의 성분벡터와 성분은 아래와 같이 정의된다.
- 파란색은 (벡터 A의) 성분벡터이고, 초록색은 (벡터 A의) 성분이라 한다.
세 가지 좌표계
Three Geometry Coordinate System
전자기학에서 다루는 문제는 3차원의 세상이고, 이를 표현할 수 있는 좌표계는 크게 3가지이다.
- 직각좌표계(rectangular coordinate system)
- 원통좌표계(cylindrical coordinate system)
- 구좌표계(spherical coordinate system)
직각좌표계
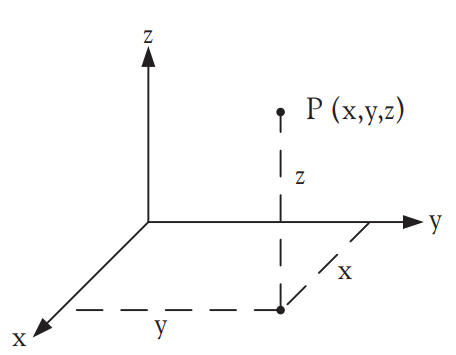
그림 2. 직각좌표계
직각좌표계[그림 2]는 오른손 법칙[그림 3]으로 설정된 좌표축의 시스템이다.
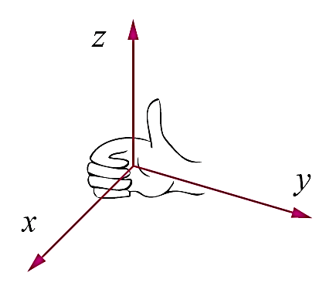
그림 3. 오른손 법칙
- 각각의 축은 x, y, z로 명명되며, 이들의 단위벡터는 i, j, k 또는 hat x, hat y, hat z로 표현한다.
- 원점으로부터 각 축을 향해 뻗어나가는 정도를 x, y, z라고 하면, 점 P는 P(x, y, z)[그림 2]로 표현된다.
원통좌표계
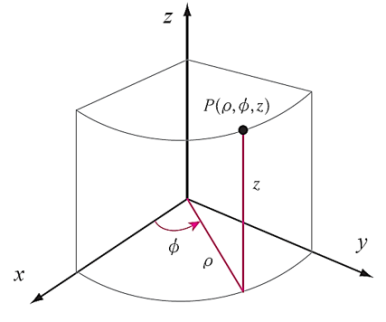
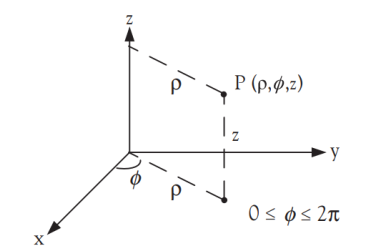
그림 4. 원통좌표계
- 원통좌표계는 직각좌표계의 x, y, z처럼 세 가지의 특수한 좌표값을 갖는다.
- ρ: (점 P가) z축으로부터 떨어진 거리[그림 4]
- φ: 방위각(azimuth angle), +x축으로부터 반시계 방향의 각도
- z: xy평면으로부터 높이
- 각각의 좌표는 아래와 같은 특수한 조건값을 만족해야 한다.
원통좌표계의 각각의 좌표에 대한 단위벡터는 다음과 같다.[그림 5]
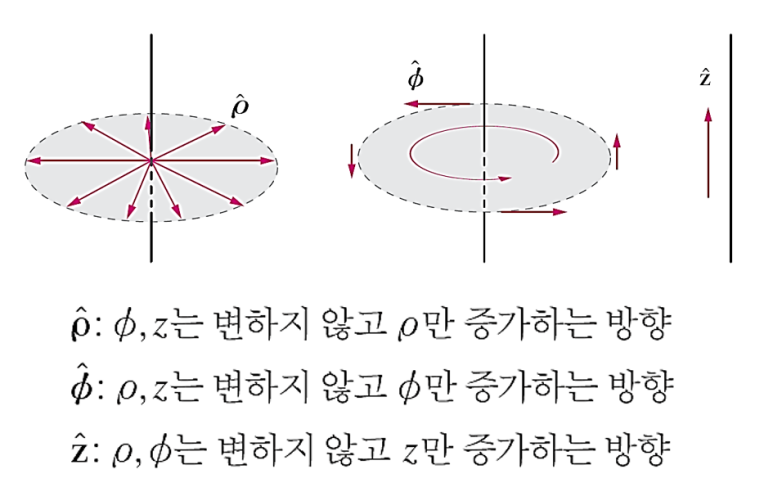
그림 5. 원통좌표계 단위벡터의 설명 [출처: Able 전자기학]
원통좌표계의 단위벡터는 방사(ρ), 회전(φ), 그리고 증가(z)의 형태를 보인다.
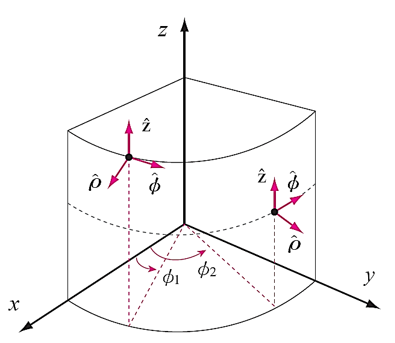
그림 6
- 원통좌표계의 각 단위벡터는 [그림 6]과 같이 서로 수직한다. 특히 단위벡터 ρ와 φ는 φ좌표의 함수이다.
- 원통좌표계의 기본단위벡터를 활용하여, 각 성분의 크기를 가진 벡터를 아래와 같이 표현할 수 있다.
직각좌표계와 원통좌표계의 변환
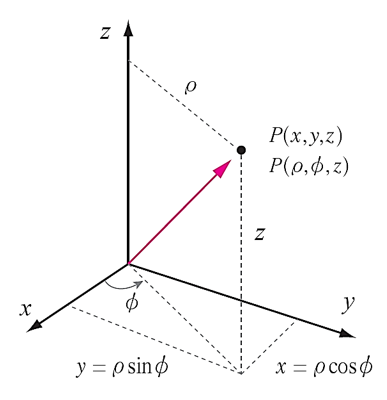
그림 7. 직각좌표계와 원통좌표계
3차원의 좌표 시스템에 놓인 점 P는 직각 좌표계와 원통 좌표계 모두의 좌표값으로 표현될 수 있으며, 이들은 서로 변환되어 계산될 수 있다.[그림 7]
- 원통 → 직각: 원통좌표를 이용하여 직각좌표를 구하는 식
- 직각 → 원통: 직각좌표를 이용하여 원통좌표를 구하는 식
구좌표계
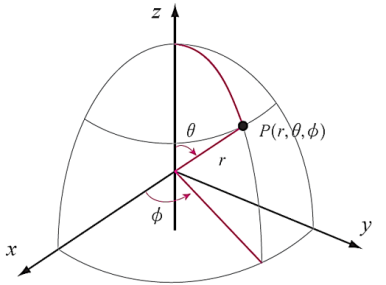
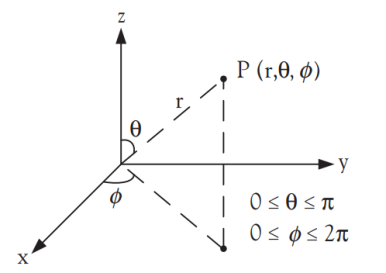
그림 8. 구좌표계
- 구 좌표계[그림 8] 역시 특수한 세 가지 좌표를 갖는다.
- r: 원점으로부터 떨어진 거리
- θ: 편각(polar angle), +z축으로부터의 각도(z축과 선 OP가 이루는 각도[그림 8])
- φ: +x축으로부터 반시계 방향의 각도
- 각각의 좌표는 아래와 같은 특수한 조건값을 만족해야 한다.
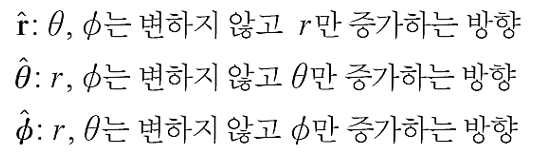
구좌표계의 기본단위벡터는 [그림 9]와 같은 형태를 갖는다.
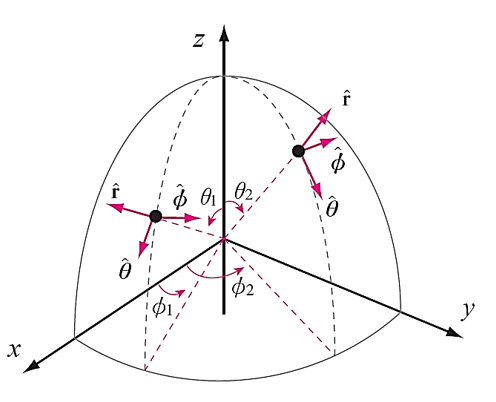
그림 9. 구좌표계의 단위벡터
- 구좌표계의 기본단위벡터를 활용하여, 각 성분의 크기를 가진 벡터를 아래와 같이 표현할 수 있다.
직각좌표계와 구좌표계의 변환
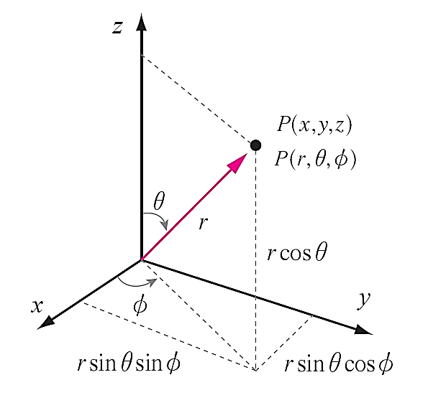
그림 10
직각좌표계를 구좌표계 또는 반대의 좌표 내용으로 변환[그림 10]할 수 있다.
- 구좌표 → 직각좌표: 구좌표를 활용하여 직각좌표를 구하는 식
- 직각좌표 → 구좌표: 직각좌표를 이용하여 구좌표를 구하는 식
원통좌표-구좌표의 직접적인 변환은 그 공식이 비직관적이기 때문에, 대부분 처음 제시된 좌표계의 좌표를 직각좌표로 변환한 뒤 이 변환된 직각좌표를 원통좌표 또는 구좌표로 변환한다.
좌표의 변환
Equations of Transformation Between Coordinate Systems
좌표의 변환식을 정리하면 아래와 같다.
1. 원통좌표를 이용하여 직각좌표를 구함 식
2. 직각좌표를 이용하여 원통좌표를 구함 식
- 원통좌표와 직각좌표의 z값은 서로 같다.
- 원통좌표의 ρ는 점 P의 xy평면(2차원) 위의 투영과 원점 사이의 거리이고, 방위각 φ 또한 xy평면(2차원) 상의 각이므로, 둘은 '2차원 상의' 직각좌표와 평면 극좌표(polar coordinate) 간의 관계식과 매우 유사하다.
3. 구좌표를 활용하여 직각좌표를 구함 식
4. 직각좌표를 이용하여 구좌표를 구함 식
'고급물리학 > 고전역학' 카테고리의 다른 글
| [물리학-고전역학] 다변수 함수와 편미분 | Multivariable Functions and Partial Derivatives (0) | 2023.10.24 |
|---|---|
| [물리학-고전역학] 질량 중심 | Center of Mass (0) | 2023.10.08 |
| 【2022 물리학 | 고전역학】 좌표계와 삼각함수 ☆보충자료☆ (0) | 2022.01.16 |
| 【2022 물리학 | 고전역학】 힘의 종류: 마찰력 | 이론 (0) | 2022.01.12 |
| 【2022 물리학 | 고전역학】 힘의 종류: 수직항력 ★문제풀이★ (0) | 2022.01.09 |